Autonomous Navigation and Scanning System
Using ESP32-CAM and ROS for 2D/3D Indoor Environment Mapping
Project Gallery
Image Placeholder 1
Add your project image here
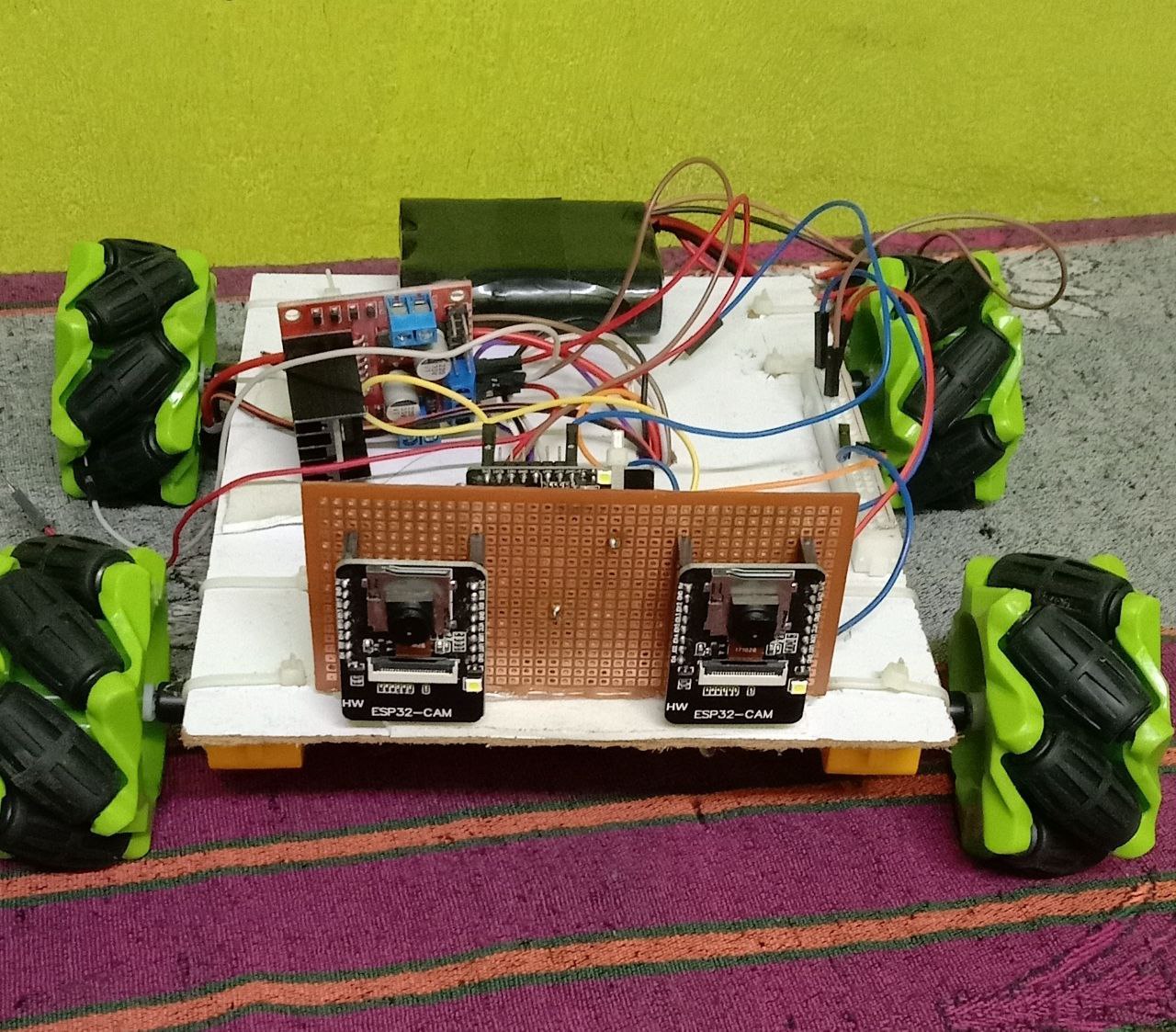
Image Placeholder 2
Add your project image here
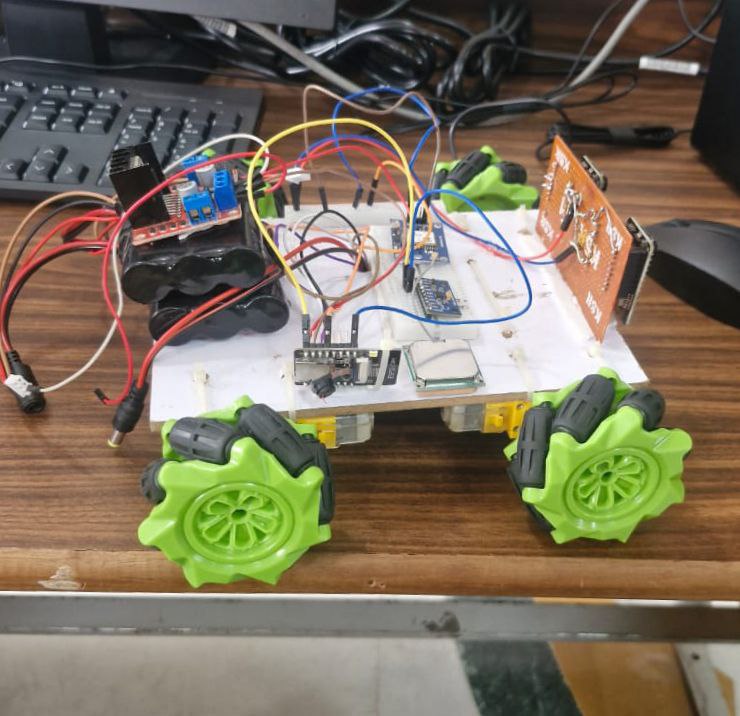
Image Placeholder 3
Add your project image here
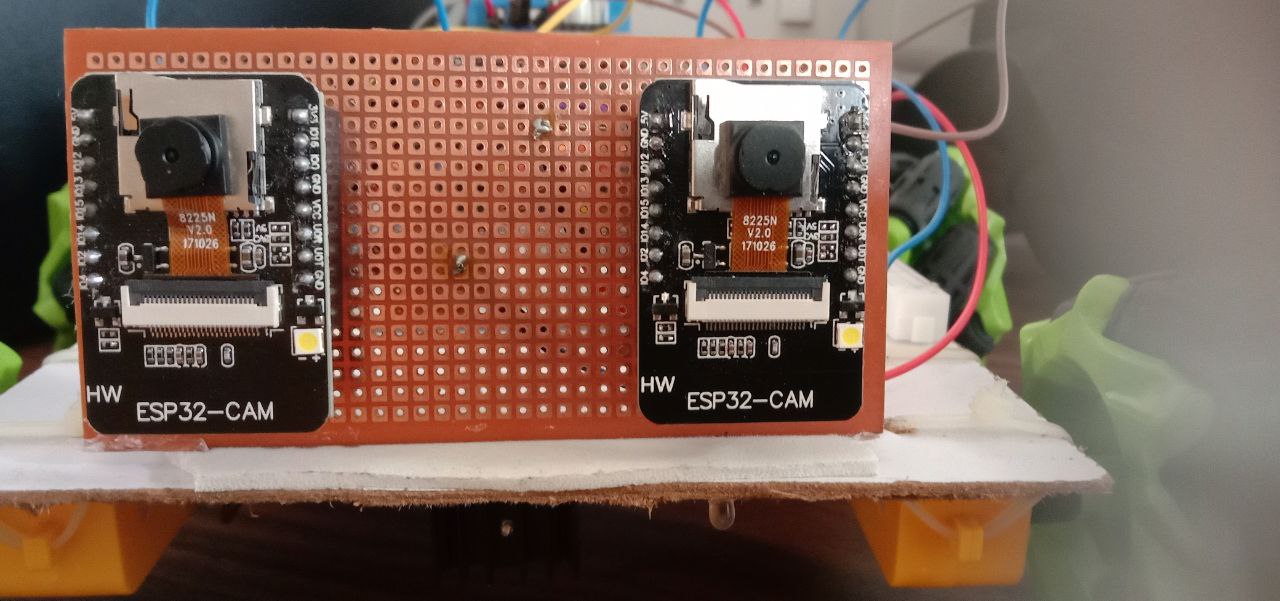
Image Placeholder 4
Add your project image here
Project Overview
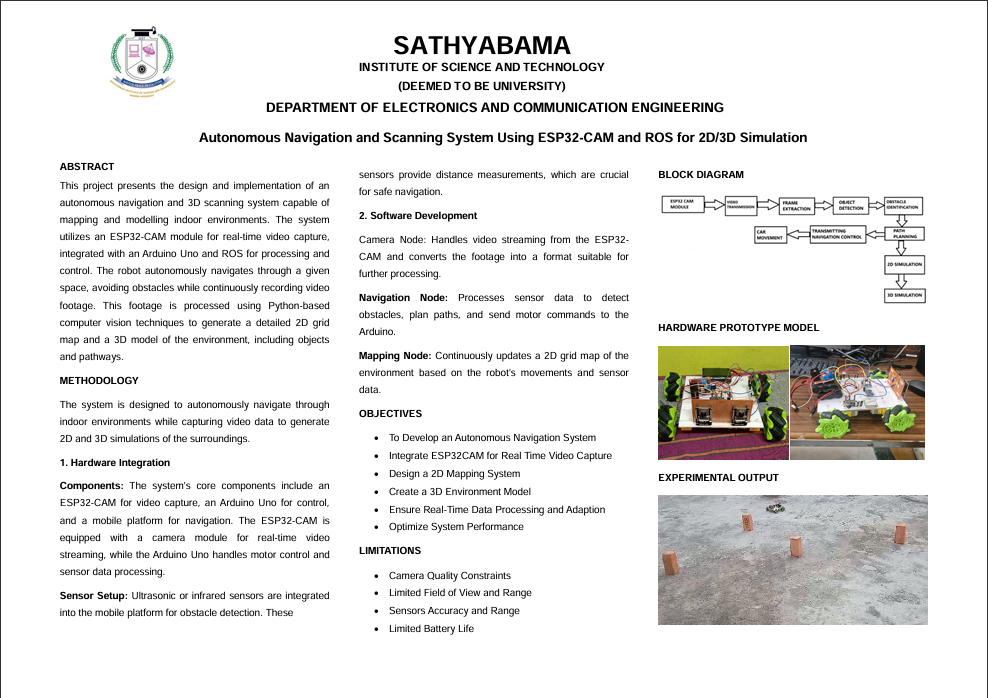
An innovative robotics project that combines embedded systems, computer vision, and autonomous navigation to create an intelligent indoor mapping solution. The system autonomously explores indoor environments, detecting and avoiding obstacles while simultaneously capturing real-time video footage to construct detailed 2D grid maps and 3D environmental models.
Developed at Sathyabama Institute of Science and Technology, Department of Electronics and Communication Engineering, this project demonstrates the integration of affordable components like ESP32-CAM and Arduino with powerful frameworks like ROS to achieve sophisticated navigation and environmental modeling capabilities.
Technical Architecture
Camera Node
ESP32-CAM module handles real-time video streaming and converts footage into formats suitable for computer vision processing
Navigation Node
Processes sensor data from ultrasonic/infrared sensors to detect obstacles, plan paths, and send motor commands
Mapping Node
Continuously updates 2D grid map and builds 3D environmental reconstructions based on robot movements
Hardware Components
- ▸ESP32-CAM: Video capture with integrated WiFi transmission
- ▸Arduino Uno: Motor control and sensor data processing
- ▸Ultrasonic/IR Sensors: Obstacle detection (10-200cm range)
- ▸Motor Driver & DC Motors: Precise mobility control
- ▸Custom Chassis: Houses all electronic components
Software Stack
- ▸Python (OpenCV, NumPy): Computer vision & image processing
- ▸ROS: System integration and inter-process communication
- ▸Arduino C/C++: Microcontroller programming
- ▸SLAM Algorithms: Simultaneous localization and mapping
- ▸Sensor Fusion: Multi-sensor data integration
Core Features & Capabilities
Autonomous Navigation
Intelligent path planning with real-time obstacle detection and dynamic trajectory adjustment using multi-sensor fusion
Real-Time Processing
ESP32-CAM streams video at 15-30 FPS with Python-based OpenCV pipelines for frame-by-frame spatial analysis
2D Grid Mapping
Occupancy grid representation of explored space with free/occupied/unexplored cell classification
3D Reconstruction
Computer vision-based 3D modeling using feature detection, stereo principles, and structure-from-motion
Performance Specifications
Technical Challenges & Solutions
⚡ Camera Quality Constraints
✓ Implemented adaptive image enhancement algorithms and optimized lighting conditions for ESP32-CAM limitations
⚡ Limited Field of View
✓ Strategic movement patterns with multiple-pass scanning for comprehensive environment coverage
⚡ Sensor Accuracy Variations
✓ Multi-sensor fusion combining ultrasonic and infrared data for improved reliability
⚡ Power Management
✓ Balanced performance with energy efficiency through selective processing and intelligent sleep modes
Real-World Applications
Indoor Mapping
Accurate floor plans of buildings and facilities
Security & Surveillance
Autonomous patrol and monitoring systems
Inventory Management
Warehouse layout scanning and optimization
Emergency Response
Exploring hazardous environments safely
Smart Homes
Learning and adapting to residential layouts
Research & Education
Platform for robotics and AI learning
Future Enhancements
Interested in This Project?
This project demonstrates advanced robotics, computer vision, and autonomous systems integration. Feel free to reach out for collaboration or technical discussions.