Autonomous Quadruped with Robotic Arm
Precision Weed Removal for Sustainable Agriculture
Image Placeholder 1
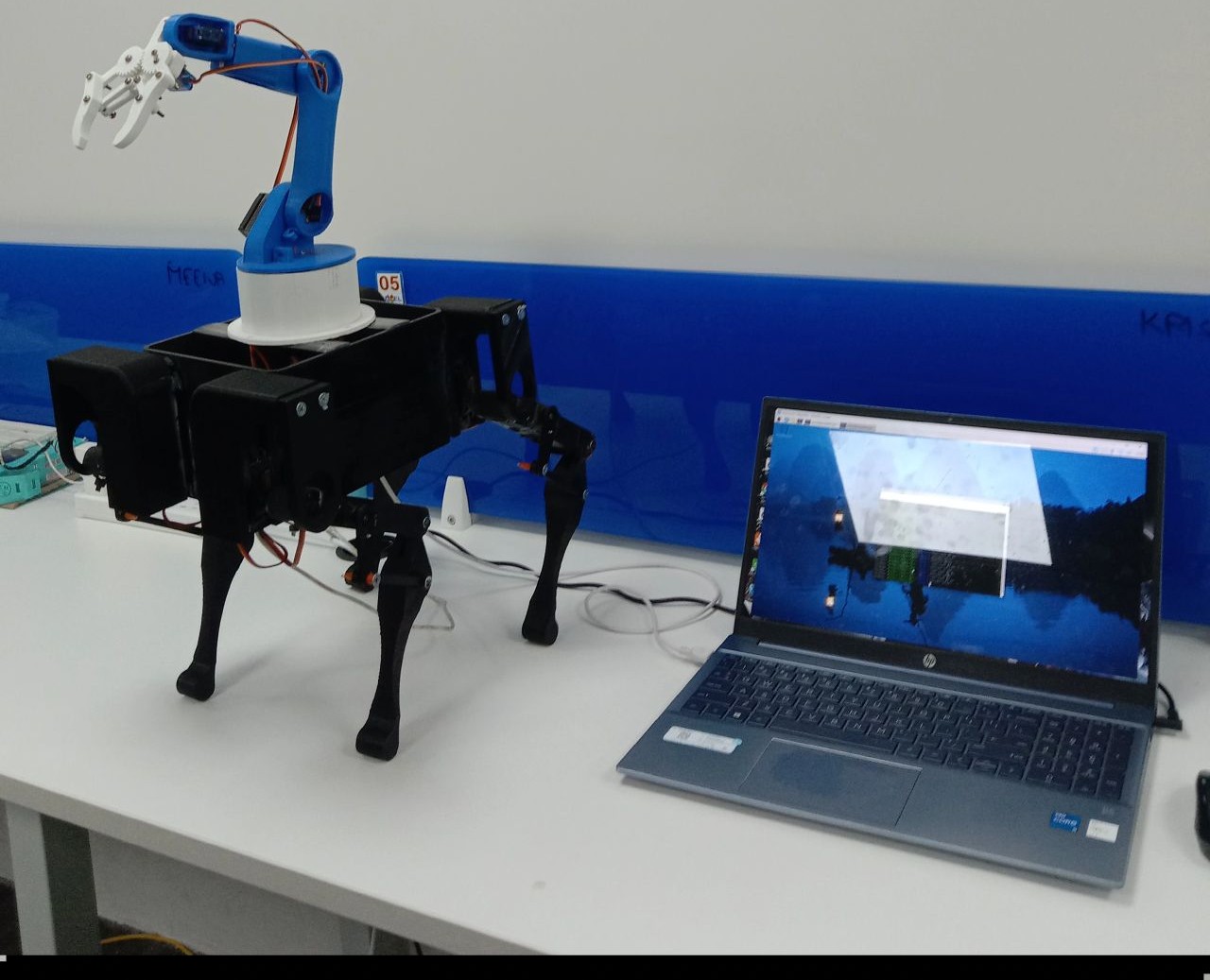
Quadruped Robot Overview

Project Overview
A precision agriculture solution that combines legged robotics, computer vision, and intelligent manipulation to address the critical challenge of sustainable weed management. This system represents a shift from chemical-intensive farming to mechanical intervention, utilizing a terrain-adaptive quadruped platform equipped with a 4-DOF robotic arm and real-time vision processing for autonomous weed detection and removal.
Developed at Sathyabama Institute of Science and Technology, this project addresses the environmental impact of chemical herbicides while reducing labor costs by 70% through autonomous operation.
Problem Statement
Traditional weed control methods pose significant challenges: manual weeding is labor-intensive and costly, while chemical herbicides harm the environment, contaminate soil and water, and contribute to herbicide-resistant weed strains. The agricultural sector requires an efficient, sustainable, and precise weed management system that operates effectively on uneven terrain typical of real-world farming environments.
Image Placeholder 2
System Architecture & Components
Technical Architecture
Locomotion System
Quadruped chassis with bio-inspired gait patterns providing stable navigation across rough agricultural terrain using adaptive control algorithms
Vision System
ESP32-CAM module with real-time computer vision processing to distinguish weeds from crops using deep learning models
Manipulation System
4-DOF robotic arm executing precise mechanical weed removal guided by inverse kinematics calculations
Hardware Specifications
- ▸Quadruped Platform: 8-DOF locomotion (4 legs × 2 DOF each)
- ▸Servo Motors: High-torque 35 kg/cm for leg actuation
- ▸Leg Segments: Two 19 cm segments per leg (38 cm total reach)
- ▸4-DOF Robotic Arm: 20 kg/cm precision servos with 3D-printed components
- ▸Raspberry Pi: Central processing unit for coordination and vision
- ▸ESP32-CAM: Real-time video capture and streaming
- ▸3-Axis Gyroscope/IMU: Balance monitoring and tilt compensation
Software Stack
- ▸Python: Primary language for control algorithms and integration
- ▸OpenCV: Image processing for weed detection and feature extraction
- ▸NumPy: Numerical computations for IK and trajectory planning
- ▸SLIP Model: Bio-inspired locomotion control for energy-efficient gaits
- ▸Inverse Kinematics: Mathematical framework for arm positioning
- ▸Deep Learning: CNN-based weed/crop classification models
- ▸VNC Server: Remote monitoring and wireless control
Image Placeholder 3
Quadruped Locomotion & Gait Control
Core Features & Capabilities
Autonomous Terrain Navigation
SLIP model-based control with 8-DOF locomotion providing superior mobility on muddy fields, uneven ground, and crop rows without soil compaction
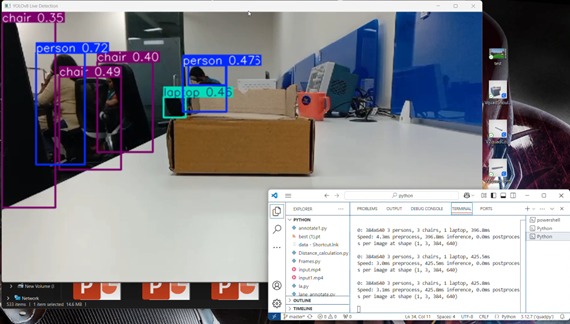
Real-Time Weed Detection
CNN-based classification analyzing morphological features and color signatures with detection overlays for system verification
Precision Mechanical Intervention
3D position calculation with IK solver commanding 4-DOF arm for mechanical removal, eliminating chemical herbicides
Adaptive Control Systems
3-axis gyroscope with real-time orientation feedback compensating for body tilt and maintaining arm accuracy
Performance Specifications
Image Placeholder 4
4-DOF Robotic Arm & Weed Removal Mechanism

Implementation Highlights
🦿 Bio-Inspired Locomotion
The SLIP model (Spring-Loaded Inverted Pendulum) abstracts the quadruped as a point mass bouncing on compliant legs, enabling lightweight, computationally efficient control that generates natural gaits suitable for agricultural environments with minimal energy expenditure.
🎯 Inverse Kinematics Solver
For the 4-DOF arm, the IK problem involves computing joint angles θ₁, θ₂, θ₃, θ₄ given desired end-effector position (x, y, z). The system implements geometric and algebraic methods to solve these equations in real-time, ensuring the arm reaches target weeds accurately.
👁️ Computer Vision Pipeline
The vision system preprocesses camera frames, applies segmentation to isolate vegetation, and uses trained CNN classifiers to distinguish crop species from weed species. Detected weed centroids are converted from image coordinates to world coordinates using camera calibration parameters.
⚖️ Dynamic Stability Control
The control algorithm continuously monitors gyroscope data to detect body roll, pitch, and yaw. When deviations exceed thresholds, the system adjusts leg servo positions to restore balance, preventing tip-overs on slopes or during arm extension movements.
Technical Challenges & Solutions
⚡ Terrain Adaptability
✓ SLIP model's inherent compliance and energy-aware trajectory synthesis enable robust performance. Four-point contact distributes weight, minimizing soil compaction
⚡ Real-Time Processing Constraints
✓ Optimized algorithms with reduced-resolution images and ESP32-CAM handling video encoding, offloading tasks from Raspberry Pi
⚡ Weed Classification Accuracy
✓ Training deep learning models on diverse datasets representing different field conditions and growth stages improves robustness
⚡ Power Management
✓ Efficient gait patterns minimizing energy expenditure per stride and power-optimized servo control strategies extend battery life
⚡ Arm-Base Coordination
✓ Gyroscope provides orientation feedback updating IK reference frame, compensating for body tilt and movement
Image Placeholder 5
Field Testing & Real-World Operation

Applications & Impact
Precision Weed Management
Targets individual weeds, reducing herbicide use by 90% compared to broadcast spraying
Labor Shortage Mitigation
Automates repetitive manual weeding tasks, reducing labor costs by 70%
Organic Farming
Enables chemical-free weed control, supporting organic certification requirements
Crop Health Monitoring
Vision system adaptable for detecting diseases, pests, or nutrient deficiencies
Targeted Pesticide Application
Robotic arm can be equipped with spraying nozzles for spot treatment
Environmental Sustainability
Eliminates soil and water contamination from chemical herbicides
Results & Validation
Future Enhancements
Project Impact
This project successfully demonstrates the viability of combining quadruped robotics, computer vision, and intelligent manipulation for sustainable precision agriculture. By providing an environmentally friendly alternative to chemical herbicides while addressing labor challenges, this autonomous system represents a significant step toward the future of smart farming.
Team: Pilli Ashok Kumar (41130394), Podapala Venkat (41130396)
Guided by: Dr. T. Ravi, M.E., Ph.D., Head of Department
Institution: Sathyabama Institute of Science and Technology
Interested in This Project?
This project demonstrates advanced agricultural robotics, bio-inspired locomotion, and sustainable farming technology. Feel free to reach out for collaboration or technical discussions.